Os campeões fazem parte do Laboratório de Robótica Móvel do ICMC: a ideia do grupo é que as melhorias testadas na plataforma da competição possam ser implementadas no Carro Robótico Inteligente para Navegação Autônoma (CARINA II), possibilitando a locomoção em situações mais complexas. ( imagem: divulgação LRM/ICMC)
Foi preciso percorrer 6.582 quilômetros por mais de 5,7 mil horas para que os 69 carros autônomos dos melhores laboratórios de pesquisa do mundo concluíssem uma competição inédita. São quilômetros mais do que suficientes para cruzar, de carro, a distância que separa o Oiapoque, no extremo norte do Brasil, do Chuí, no extremo sul. A questão é que esses carros não alcançaram a façanha enfrentando estradas pavimentadas ou de terra, mas usando uma plataforma virtual que simula percursos, o Car Learning to Act (CARLA)
Tal como em um rally da vida real, a competição internacional demandava que os veículos criados pelos 211 participantes percorressem rotas virtuais, encarando engarrafamento, chuva, placas de trânsito, semáforos, carros desavisados, pedestres incautos além de outros imprevistos. No entanto, diferentemente dos jogos eletrônicos, nesse caso não havia controle remoto: os participantes da disputa programavam seus veículos diretamente de seus laboratórios de pesquisa, espalhados por vários locais do planeta, e enviavam os códigos para computadores que processavam essas informações. Automaticamente, a plataforma de simulação verificava como cada veículo tinha se comportado e computava os pontos obtidos. Nesse rally virtual, não é quem anda mais rápido que se torna campeão, mas quem comete o menor número de infrações e acumula mais pontos.
Resultado: o carro autônomo criado por seis alunos de pós-graduação e dois professores da USP obteve o melhor desempenho em três das quatro categorias do Desafio de Direção Autônoma CARLA, que foi patrocinado por empresas líderes na corrida pelo desenvolvimento da tecnologia para veículos autônomos. O time ainda conseguiu o segundo lugar na única categoria que não venceu e conquistou um prêmio total de US$ 17 mil. “A principal motivação dos pesquisadores em direção autônoma é promover segurança. A ideia é, no futuro, ter um nível de automação em que os veículos autônomos sejam capazes de alcançar resultados melhores do que um ser humano”, explica Júnior Rodrigues da Silva, doutorando do Instituto de Ciências Matemáticas e de Computação (ICMC) da USP e um dos membros da equipe campeã.
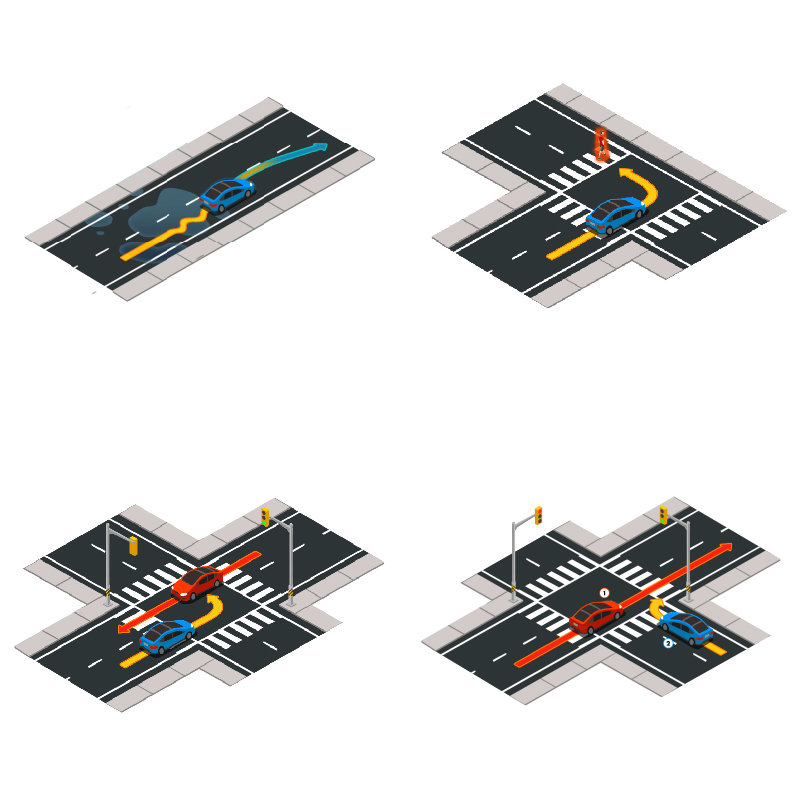
Ilustrações retratam situações de tráfego apresentadas na plataforma de simulação para carros autônomos (imagem: site CARLA)
Coordenada pelos professores Denis Wolf e Fernando Osório, do Laboratório de Robótica Móvel do ICMC, a equipe foi composta por mais cinco pós-graduandos: Angelica Mizuno Nakamura; Iago Pachêco Gomes; Jean Amaro; Tiago Cesar dos Santos e Luis Alberto Rosero. O doutorando Júnior ressalta ainda que, para se tornarem mais competentes que os humanos, os veículos autônomos ainda têm uma longa estrada pela frente. Daí a relevância de participar de desafios de simulação, que possibilitem às máquinas passarem por situações muito próximas às que os motoristas vivenciam no mundo real.
Reduzindo as incertezas
Ampliando os conhecimentos
O carro autônomo campeão, criado pelos seis alunos de pós-graduação e dois professores da USP, é resultado de um trabalho que vem sendo realizado desde 2010 no Laboratório de Robótica Móvel do ICMC. Responsável por promover o primeiro teste de carro autônomo em vias públicas da América Latina em 2013, o Laboratório também criou um caminhão autônomo em parceria com a Scania em 2015. “Já tínhamos desenvolvido algoritmos de percepção para o projeto do Carro Robótico Inteligente para Navegação Autônoma (CARINA) e para o caminhão. Então, aproveitamos esses algoritmos no desafio internacional, fazendo os ajustes necessários. A ideia, agora, é que essas melhorias testadas na plataforma simulada possam ser implementadas no CARINA II, possibilitando que nosso carro possa se movimentar por cenários mais complexos”, afirma Júnior.

Laboratório também criou um caminhão autônomo em parceria com a Scania em 2015 (imagem: Paulo Arias)
É fato que os benefícios potenciais dos veículos autônomos são imensos e vão desde a eliminação de acidentes causados por erros humanos até a redução da emissão de dióxido de carbono e o uso mais eficiente de energia e infraestrutura. No entanto, muitas questões tecnológicas permanecem sem resposta, tais como: qual é a melhor combinação de sensores para um carro autônomo? Quais componentes do sistema podem ser aprimorados com os próprios dados obtidos durante os percursos? Em quais situações de tráfego diferentes algoritmos falham?
Perguntas como essas poderão ser respondidas mais rapidamente com a participação das equipes de pesquisadores em competições como o Desafio de Direção Autônoma CARLA. Os brasileiros largaram na frente, mas estamos ainda no começo da era dos veículos autônomos. A manutenção da liderança depende da valorização da ciência brasileira e de futuros investimentos.
Por Denise Casatti e Marília Calábria – Assessoria de Comunicação do ICMC/USP